The origins of satellite navigation date back to the late 1950s, when the U.S. Navy began to develop the Navy Navigation Satellite System (better known as TRANSIT), which became known as the world’s first global navigation satellite system (GNSS). TRANSIT, and its successors — the U.S. Global Positioning System (GPS) and the Russian GLONASS system — was originally designed to serve military needs, but later evolved to serve civilian purposes as well. This sparked the formation of a rapidly developing GNSS industry and has made possible the development of a variety of different GNSS applications. Specifically, car and personal navigation devices as well as location-based services in the form of various smartphone apps have made GNSS a part of our everyday lives.
The emergence of an ever-growing number of GNSS applications has driven the need to use GNSS simulators to ensure time- and cost-efficient development cycles. This article provides an overview of how GNSS applications can efficiently be tested, the type of simulators and simulation methods that are used, and which simulation capabilities a modern simulator should include.
Typical GNSS Applications
In addition to the personal navigation use that most of us associate satellite navigation systems with, there are many other useful applications for GNSS technology, including:
- Aviation: Air flight navigation requires a high level of accuracy for the en route navigation, approach, and landing.
- Automotive: Customized in-vehicle navigation systems help users by providing reliable driving directions. New modernized systems include safety enhancements that improve vehicle handling characteristics.
- Weak signal navigation: Certain applications, such as indoor environments where the signal quality is poor, require an enhanced GNSS rather than standalone system.
- Marine: GNSS are standard on all boats today.
- Space: GNSS are primarily used in low Earth satellites, but are increasingly being used in space vehicles operating at higher altitudes.
- Agriculture: GNSS field measurements combined with geographic information system tools provide accurate regional maps for resource monitoring and management.
- Geodesy and surveying: The precise positioning information afforded by today’s sophisticated GNSS enable us to monitor the movements of the Earth’s crustal plates or ice shelves.
- Scientific: GNSS can be used for remote sensing of the environment and space weather studies.
The Benefits of GNSS Simulators
An RF-based GNSS signal simulator is an excellent way to validate the performance of GNSS receivers and systems for research and development, manufacturing and system integration testing. GNSS simulators are used in approximately all applications, from aviation to civilian and military use, and offer an advantage over live GNSS signals by enabling complete control over the signals and conditions. This allows users to more accurately test GNSS systems before they are used in a real-world setting.
A simulator produces the exact same signals that are transmitted from GNSS satellites under a controlled setting so that users can regulate certain parameters such as the date, time, and location; vehicle motion; environmental conditions; and signal errors and inaccuracies. Therefore, using an RF-based GNSS signal simulator is the preferred method for testing satellite navigation receivers during R&D, design, manufacturing, certification, and maintenance stages because it offers a more reliable approach than using a live satellite.
Types of Simulators
In order to understand why it is useful to perform GNSS tests with a simulator, it is important to comprehend the testing needs of different user groups and the simulation requirements that can be derived from various test applications. There are a number of simulator devices, and each is ideally suited to a particular application or user group based on its design.
There are two types of full-scale RF signal simulators: single-channel and multichannel. A single-channel system can simulate a signal from one satellite and usually has the capability to control a signal’s Doppler profile. This type of simulator is suited for production and R&D testing. On the other hand, multichannel simulators perform simulation of multiple satellite signals and are commonly used for R&D, design, manufacturing, and post-launch tests. One key benefit of a multichannel RF simulator is that it provides repeatability of the signal generation. Not only does it simulate multiple satellite channels, but also complete constellations at runtime. RF simulators are also capable of simulating single or multiple frequencies, which is advantageous for users, as they can work with a number of frequencies from a sole platform.
In general, an arbitrary band limited RF signal can be generated by an I/Q modulator. (See Figure 1.) This
analog component has three main inputs: I, Q, and LO. It receives two independent baseband signals at the I and Q ports, commonly referred to as the in-phase and quadrature components, respectively. This is also the origin of the term I/Q modulation. The LO input of the modulator is usually connected to a frequency synthesizer generating the RF carrier wave.
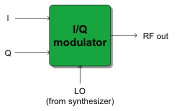
Figure 0: Simplified block diagram of an I/Q modulator
Mathematically, I/Q modulation works by using the carrier wave twice, once directly and once with a phase shift of 90°. (See Figure 2.) The two orthogonal carrier signals with the frequency fc are individually multiplied with either the I or Q input signal. The output is generated by adding both products.
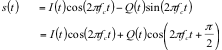
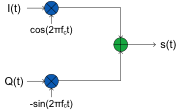
Figure 2: I/Q modulation principle
Consequently, I and Q form a complex baseband signal with real and imaginary parts. The main advantage is that the baseband signal is already the combination of all simulated satellite vehicles at this frequency. Therefore, in this case, interchannel bias is eliminated completely.
An RF recorder/replay system is yet another type of signal simulator that collects data, which is then processed by a software receiver. A recorder simulator is perfect for aviation applications, where it is necessary to test the integration of GNSS receivers with inertial navigation systems. In this situation, an RF recorder system can be used generate the information from one flight that would otherwise require hundreds of flights. Replay devices enable a user to play back a recorded signal and reverse the operations it went through. This is helpful in situations where the digitized intermediate frequency (DIF) signal is insufficient and needs to be bypassed.
A final type of simulator is a pseudolite. A pseudolite is a single-channel simulator that provides in-the-field simulation of future satellite systems. This type of system is ideal for testing the signals of upcoming GNSS such as Galileo in Europe or BeiDou in China; however, a pseudolite simulator is limiting in that it can only be used for R&D purposes and in restricted areas.
Modern Simulation Capabilities
Modern GNSS simulators are designed to meet the needs of any application, ranging from research and development of GNSS safety and professional applications, to system integration and production testing of mass market applications including automotive sat-nav, mobile phone apps, chipsets, and handheld personal navigation devices. As discussed earlier in this article, they support a variety of channels and frequencies and while most standard GNSS services can only simulate one simultaneous transmit antenna, some of today’s more sophisticated systems provide additional flexibility by giving users the capability to simulate two, three, or four multi-GNSS sources from a single unit. Additional advancements include:
- Smooth Doppler shift simulation for precise signal simulation even when simulating high-dynamic trajectories.
- GNSS correction data generation. Correction data, usually in the RTCM format, minimizes the effects of atmospheric and satellite errors on position determination.
- Vehicle motion models that simulate the motion behavior of any type of vehicle, such as an airplane, car, ship, or pedestrian user.
- CAN-Bus interface for automotive applications, which emulates a wheel’s sensor data in real time according to the motion behavior of the vehicle.
- Antenna patterns to simulate the effects of different receiver antennas
- Multipath models, such as point reflector, statistical channel model, and import of multipath data by file help users more precisely simulate environmental effects.
- A remote control interface that includes commands to control and steer the simulator without using the GUI. This means that the GNSS simulators can be integrated with an existing automatic test system, thus providing users with the capability to build commands into existing test systems.
One practical example of a modern GNSS simulator is the simulation of a static position and generation of the corresponding RF signal. Of course, it would also be possible to simulate movement, such as driving from New York to Philadelphia or flying from Paris to Amsterdam. The receiver perceives no difference in the RF signal than it would from a signal picked up from an antenna. It is also possible to add specific errors to the signal for receiver tests, which cannot be achieved using the real signal in space.
Conclusion
These are just some of the innovative features that modern GNSS simulators offer while aiding in the successful R&D of global satellite navigation systems. As additional GNSS signals become available and augmentation systems drive forward new growth, more enhancements will be made to GNSS.
The accuracy and reliability of GNSS will also be improved by third-party augmentation systems, such as WAAS and EGNOS. As these augmentation systems are optimized, users will experience an even more streamlined satellite navigation system.
{kind=link}